
 中文
中文

- 來源:
- 日期: 2020-05-16
0 引言
近幾(jǐ)十年,隨著自動化技術(shù)的極大進步和國民物質(zhì)生活水平顯著提高,各行各業的發展(zhǎn)更多地依賴於物料(liào)輸送(sòng)。特別地,管道輸送憑(píng)借(jiè)著輸送量大(dà)、方便快捷、低成本等優勢(shì),在國民經濟中占有越來越大的比重,已廣泛(fàn)應用於石油、化工、能源、食品加工(gōng)、城市供排水、農業灌溉、核工業等領(lǐng)域。但由於受到輸送介質的化學性腐蝕(shí)、不可抗力的自然災害以及(jí)自身缺陷的影響,極有可能發生輸(shū)送物泄露導致的,如環境汙染、易燃物爆炸、能源浪(làng)費等嚴重事故。所以需要定期對管道內部進行檢(jiǎn)查、維護和清潔保養。傳統管道檢測都是由相關人員實施,工作量大,效率低下。而且有些管道位置人員無法到達實施監測(cè),比如(rú)輸送有毒化學品或內(nèi)部結(jié)構複雜狹小的管道。由此,管(guǎn)道機器人應運而生(shēng)。管道機器人是一種可(kě)沿(yán)細小(xiǎo)管道內部或外部(bù)自動行走、攜帶(dài)一種或(huò)多種傳感器及操作機械,在工作人(rén)員的遙控操作或計算機自動控製下,進行一係列(liè)管道作業的機、電(diàn)、儀一體化係統[1] 。依靠快速運動、靈活操縱、準確判(pàn)斷和低(dī)成本等優點,管(guǎn)道(dào)檢測機器人已(yǐ)成為當下(xià)國內外(wài)研究的熱點。
自上世紀50年代以來,隨著計算機(jī)技術、通信技術、圖像處(chù)理技術、微電子技(jì)術、傳感器技術和機械(xiè)設計製造技術的進步,管道機器人得到了空前的發展。但除了部(bù)分功(gōng)能簡單的管道機器人實現市場化生產以外,大(dà)部分還處在實驗室開(kāi)發階段(duàn)。傳統(tǒng)管道機器人麵對垂直管道、彎(wān)管、支管、變徑和微小管道(dào)等難題,仍存在很大的改善空間。
本論文在(zài)詳細介紹(shào)管道機器人的結構組成、分類、性能比較外,還將重點介紹當前國內外管道檢測機器人在麵對複雜管道結構時(shí)的最新設計理念和解決方案。
1 管道機器人的構成(chéng)與分(fèn)類
1.1管道機器人的構成
總體上講,管道機器人是由運動機構、控製模塊、信號采集模塊、供能(néng)模塊和輔助(zhù)模塊等組成。而行走方式是管道機器人的核心,它(tā)決定了管道機器人的整體性能[2] 。
1.2管道(dào)機器人的分類
根據管道機(jī)器人行走(zǒu)機構的(de)動力源及運動可(kě)控性的不同,可將其(qí)運動方式劃分為被動運(yùn)動方式和主動運動方(fāng)式兩大類。其中主動運動方式(shì)主要包括輪式、履帶式和無輪式;被動運動方式的典型代表為管道豬(PIG)。詳細劃分(fèn)參見表1。
表1 管道機器人的(de)分類

所謂主動運動方(fāng)式,是指管道機器人憑借(jiè)自身攜帶的驅動源(yuán),具備了自主行(háng)走能力,運動速度和方向都可控。並且可以裝配(pèi)儀器和工具,進行檢測、維修作業,是目(mù)前管道機器人研究的主要方向[3] 。但其結構複雜,成本較高,且能源供給(gěi)有限,不適合長距離作業。
所謂被動運動方式,是指管道機器人依靠管內流體的壓(yā)力差產生驅動力,隨著管內流體(tǐ)的流動方向移動(dòng),並可攜帶多種傳感器 。但其自身沒有行走(zǒu)能力,移動速度、範圍不易精確控製。
1.2.1輪式管道機器人(rén)
普通構造型的輪(lún)式管道機(jī)器人的車輪直接與馬達相連,結構簡單,類似小汽車,可以得到較好的速度控製和方向控(kòng)製[5] ;壓壁型的車輪通常安(ān)裝在成120°對稱的彈性壁上,獲得的摩擦力足以適應垂直管道的變徑工況;螺旋(xuán)驅動型的車輪安裝在轉子和靜子兩個(gè)模塊上。轉子的徑向螺旋運動通過換向機構轉變成定子的軸向運動。
1.2.2履帶式管道機器人
普通構造型的履帶和與驅動器直(zhí)接(jiē)相(xiàng)連的車輪相配合(hé),為機器(qì)人提(tí)供更多的(de)摩擦力[6] 。與輪式管道機器人相比(bǐ),有良好的平麵越障能力和運行穩定性;壓壁(bì)型可以在內表麵粗糙的垂直或是傾斜管道內移動。
1.2.3無(wú)輪式(shì)管道機器人
腿足型管道機器人動作靈活,可以攀(pān)爬帶有(yǒu)L、T、Y型節點的垂直管(guǎn)道和水平管道。但缺點是,為使腿部協調而穩定動作,從機械結(jié)構設計到控製係統算法都比較複雜(zá)[7] ;仿生(shēng)蠕動式(shì)管道機器人通過前後支撐部(bù)分(fèn)徑(jìng)向伸縮而運動,具有結構簡單(dān)、耗能少、驅動力大等(děng)優點,但行(háng)動比(bǐ)較緩慢[8] ;蛇行管道機器人模仿生物界蛇的行進,由若幹個可以彎曲扭動(dòng)的連接模塊(kuài)組成。由(yóu)於自由度(dù)較多,該類型機器人(rén)不易控製,但在複雜環境下(xià)的通行能力(lì),要超過(guò)其他類型的管道機器(qì)人(rén)[9] 。
2 管道機器人的性能(néng)比較
為了針對不同的作業環境和需求,設計出理想的管道機器人,麻豆免费视频有必要對各種(zhǒng)類型的管道(dào)機器人的性能指標做一個深入的(de)比較,如垂直移動能力、可操控性(xìng)、管(guǎn)道尺寸適應能力、靈活(huó)性、穩定性、移動(dòng)效率、驅動機構數量和無線控(kòng)製等,見表(biǎo)2。
表2 不同類型管道機器人的性能比較
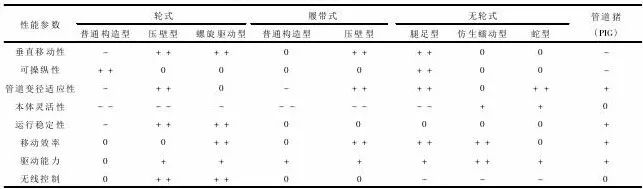
從表2中我(wǒ)們可以看到,螺旋驅動(dòng)輪式和壓壁輪式管道機(jī)器人在(zài)各個性能指標方麵(miàn)表現出很大的優勢,是未來管道機器人發展的趨勢,值得今後全球(qiú)的機器人研究(jiū)機構投入更多的科研精力。
3 國內外管道機器(qì)人的最新研究成果
傳統機器人在麵對垂直、微小、複雜管道時(shí),存在(zài)諸多實際困難,如(rú)通行性差(chà)、穩定性弱、牽引力小等。為此,世(shì)界各國研究學者根據不同類(lèi)型的管道機器人性能特征,在機械結構、行走方式、驅動能力等(děng)方麵(miàn),開發設計出很多改良型專用機器人。
3.1針對管道(dào)變(biàn)徑問題開發的(de)專用型管道機器人
韓國大邱慶北科技學院開發了一種履帶式壓壁型管道機器人,可應用於管道清潔、檢測作業(yè)[10] 。該機器人采用一種改進的剪刀梁式升降機構,由氣缸(gāng)驅動,見圖(tú)1。履帶可以沿著管道徑向移動來適應不同的管道內經,同時行進過(guò)程中又能夠獲得最小的扭力和最大的牽引力(lì)。適用的管道變徑範圍為600~800mm,負載能(néng)力為20 kg,目前還處在開發和校準階(jiē)段(duàn),未來目標是投向工業清潔領域。
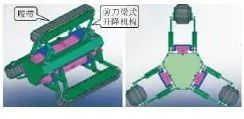
圖1 具備適應不(bú)同管徑能力的管道機器人
該設(shè)計充分發揮了履帶式機器人優秀的(de)越障能力,而壓壁式機械結構又保證了機(jī)器人在變徑管道內有足(zú)夠(gòu)的(de)支撐能力來維持(chí)移動的穩定(dìng)性。但是利用氣缸驅動(dòng),對氣源供(gòng)給提出(chū)了要求。無論是拖帶氣管還是自(zì)備氣泵,都限製了機器人在管道內的(de)靈(líng)活(huó)移動。僅適用於某些特殊(shū)管況(kuàng),通用性不高。
內蒙古(gǔ)工業大學(xué)研(yán)製了(le)一台輪式壓壁型(xíng)管道機器(qì)人,可應(yīng)用於變徑管道內清淤和檢測工作[11] 。該機器人采用連杆機構原理,滿足在變徑管(guǎn)道(96~180 mm)內的行(háng)進要求,見圖(tú)2。具體地說,在360°舵機的驅動下,絲杆會隨之轉動(dòng),可動螺母隨絲杆螺紋進行(háng)上下移動,帶動傘狀(zhuàng)伸張結構像雨傘一樣(yàng)收齊或張開,改變三(sān)組輪胎的距離,從而改變機(jī)器人的徑向尺寸。而尾架部件則起到輔助支撐作用,使機器人本體保持平衡,見圖3。以Atmega128單片機為控製核心,輔以紅外、攝像頭等傳感器采集信息並依靠APC220模塊與上位機進行無(wú)線通信。

圖2 機械實物(wù)圖
該機器人具有(yǒu)一定的彎管通行性和變徑適應性。但傘狀(zhuàng)伸(shēn)張結構缺少柔(róu)性連接,在經過管道較大變徑處,有可能造成機器(qì)人運行不穩或(huò)是本體卡住以致(zhì)驅動電機過(guò)載。

圖3 機械結構圖
3.2針對垂直管道問題(tí)開發的專用型管道機器(qì)人
馬來西亞國(guó)家能源(yuán)大學開發了一種電磁(cí)吸附式車輪型管道機器人,見圖4,可(kě)應(yīng)用於小型管道內的檢測作業[12]。該機(jī)器人采用電磁吸附(fù)原理來保證對垂直管道的適應(yīng)性,見圖5。工作原理是(shì)在由導磁合金製成的車輪輪緣內嵌入磁盤(pán),電機通過(guò)同步帶驅動車輪滾動。其中磁盤由高強度永磁材料(Nd Fe B)製成。經力(lì)學分析,強大的磁吸力(lì)足以支撐(chēng)攜帶(dài)檢測設備的機器人在導磁管道內穩定(dìng)運行,無論是垂直麵還是傾斜麵。同時(shí)也具備良好(hǎo)的越障能(néng)力和移動性。其適用的管道變徑範圍為80~180 mm。
但(dàn)管道和車輪輪緣的(de)材質(zhì)必須是導磁的,存在長期(qī)使用(yòng)腐蝕、氧化的風險,無疑限製了該(gāi)機器人的廣(guǎng)泛性使用。
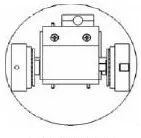
圖4 機器人外觀

圖5 垂直方向運(yùn)行
印度NITTTR學院研製了一台螺旋驅動型輪式管道機器人,可應用於垂直管道內檢測工作[13] 。該機(jī)器人采(cǎi)用螺旋驅動原理(lǐ),包括轉子和定子兩個主要機械結構,見圖6。其中轉子有三個傾斜18°的(de)輪,分別安裝在彈性臂上。利(lì)用彈性係數為0.1 N/mm的彈簧來提供所需的壓壁力,並通過萬向(xiàng)節與驅動電機相連,可以在垂直、傾(qīng)斜管道內(nèi)行走,從而保證機器人具備一定的(de)管道適應能力。此外,定子連接三個直線行走輪,提高機器(qì)人運(yùn)行的穩定性;輪胎使用橡膠材(cái)質,增加摩擦(cā)力,確保(bǎo)機(jī)器人運行時不會滑脫。適用管徑範圍為127~152 mm。

圖6 螺旋驅動型管道機(jī)器人
該機器人具有較好的管(guǎn)道適應性,可以在帶有Y型或(huò)是L型彎曲結構(gòu)的垂直、水平(píng)、傾斜管道內行走。如果有不同的行進速度要求,調(diào)整轉子輪的傾斜角度即可滿足(zú)。由(yóu)於車輪與管道(dào)壁接觸麵積小,在不平坦(tǎn)的管道內表麵行走時,有可能會發生堵轉、停機現象。
3.3針對複雜管道問題(tí)開發的專用型管道機器人
日本神奈川大學研發了一種新(xīn)式螺(luó)旋驅動型管道機器人,可應用於複雜管道內的檢測作業[14] 。該機器人本體(tǐ)與傳統螺旋驅動機器人(rén)相類似,見圖7。創新點為增加了(le)連接(jiē)單元,可以連接兩個以上的機器人本體組成一個(gè)係統。其中,連(lián)接單元包括三個伺服電機。一個電機用於改變本體運行方向,同時另兩台電機用於彎曲機器人本體,見圖8。組合機器人(rén)可在複雜管道內行進。

圖7 單個(gè)機器人本體
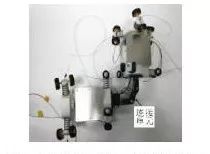
圖8 由連接單元串聯一起的(de)組合機器人
實驗證明該機器人具有很強的管(guǎn)道適應性(xìng),無論是麵對垂直、水平管道(dào),還是(shì)彎管、支管。同時其(qí)適用的管(guǎn)道(dào)變徑範圍為180~220 mm。但是組合機器人如何自動識別管(guǎn)道支路(lù)位置,連(lián)接單元內的三個伺服電(diàn)機如何協調工作都需要複雜的(de)控製算法。
4 結論
本篇論文著重闡述了(le)近五年內為提高管道機器人(rén)在複雜管道(dào)內的適應性,各國科研學者的最新(xīn)研究成果(guǒ)。但總的來說,目前國內外管道機器人(rén)的研究(jiū)還處(chù)在發展改進階段,距離成熟的市場(chǎng)化應用還存在很大距離。大多數開發出的(de)管道機器人僅適用於特定的作業環(huán)境,通用性不強。
隨著機械結構設計的改進和自動控製水平的提高(gāo),管道機器人(rén)將會更廣泛的應(yīng)用於各行各業,同時(shí)也麵對更多的挑戰。除了上文提到的垂直管道、複雜結(jié)構(gòu)管道、變徑管道等不利因素,還需要在以下方(fāng)麵有所突破:
1)行走機構的設(shè)計。在傳統運動(dòng)方式中,螺旋驅(qū)動型和壓壁型都顯示出較好的管道適(shì)應性,但也(yě)都有其局限性,如(rú)負載能力(lì)低、越障性差等。因(yīn)此,未來仍需要麻豆免费视频研(yán)究新式的行走機構來滿足不同的實際要求。如北京信息科技大學開(kāi)發的一種輪腿配合式管道機器人[15] ,結合了輪(lún)式和腿式機器人的(de)優點。當管(guǎn)道內(nèi)部無障礙物(wù)時(shí),選擇驅動能力強的輪式移動方式,使機器人快速進行管(guǎn)道內作業;當(dāng)機(jī)器人遇(yù)到障礙物時,選用靈活性(xìng)、越障性更好的腿式移動方式,跨(kuà)越障礙。
2)能量供給。管道機器人以電能驅動(dòng)為主,普遍采用攜帶蓄電(diàn)池或是拖纜供電的方(fāng)式,要麽供電時間短,要麽負載過重,都不適宜長距離複雜構造管道內的行進。因此方便持久的(de)供電方式(shì),如攜(xié)帶大容量輕型蓄電池或(huò)是能夠利用太陽能、流體自發電的係統會是未來研究重(chóng)點。
3)通信方式。常(cháng)規的線纜通信不適用於長距離或是複雜管道內(nèi)。而能夠做到(dào)有效克服金屬管道屏蔽影響的無線通信將會是未來管道機器人通訊的(de)發展趨勢。
4)圖像(xiàng)處(chù)理技術。大多數管道機器人都需要攜帶攝像頭來采集管道內的視頻信息以(yǐ)便進行探傷(shāng)、清(qīng)淤等作業,因此(cǐ)基於機器人(rén)的圖像采(cǎi)集、處理技術將會是一個極具吸引力的研究領域。
參考(kǎo)文獻
[1]陳鬆,李天劍,王會香,等.排水管道機器人綜述[J].機器人技術與應用,2014,28(1):23-27.
[2]王殿君,李潤平,黃光明.管道機器人的研究進展[J].機床與液壓,2008,36(4):185-187.
[3]曹建樹,林立,李楊,等.油氣管道機器(qì)人(rén)技術研發進展[J].油氣儲運,2013,32(1):1-8.
[4]甘(gān)小(xiǎo)明,徐濱士,董(dǒng)世運,等.管(guǎn)道機器人(rén)的發展現狀[J].機器(qì)人(rén)技術與應(yīng)用,2003,16(6):5-10.
[5]朱磊磊,陳軍.輪式移動機器人研究綜述[J].機床與液壓(yā),2009,37(8):242-247.
[6]陳淑豔,陳文家.履帶式(shì)移動機器人研(yán)究綜(zōng)述[J].機電工程(chéng),2007,24(12):109-112.
[7]劉靜,趙曉光,譚民.腿式機器人的研究綜述[J].機器人,2006,28(1):81-88.
[8]簡小剛,王葉鋒,楊鵬春.基於蚯蚓蠕動機理的仿生機器(qì)人研究進展[J].中國工程機械(xiè)學報,2012,10(3):359-363.
[9]P Liljeback,K Y Pettersen,Stavdahl,et al.A review onmodeling,implementation,and control of snake robots,Robotics and AutonomousSystems 2012,60:29-40.
[10]Y G Kim,D H Shin,J I Moon.Design and implementation of anoptimal in-pipe navigation mechanism for a steel pipe cleaning robot,in:8thint.conf.on Ubiquitous Robots and Ambient Intelligence,2011:772-773.
[11]張建偉(wěi),齊詠生,王林.一種新型可變徑管道機器人的結(jié)構設計與控製實現(xiàn)[J].測控技術,2014,33(10):64-67.
[12]M R A M Zin,K S M Sahari,J M Saad.Development of a lowcost small sized in-pipe robot,Proc.International Symposium on Robotics andIntelligent Sensors,2012:1469-1475.
[13]A Nayak,S K Pradhan.Design of a new in-pipe inspectionrobot,Prof.12th Global Congress On Manufacturing and Management,2014:2081-2091.
[14]S Yabe,H Masuta,H Lim.New in-pipe robot capable of copingwith various diameters,in:12th Int.conf.on Control,Automation andSystems,2012:151-156.
[15]高宏,黃民,李天劍,等.一種新型輪腿配合式管道機器人設計[J].現代機械,2011,38(3):52-54.
公司(sī)戰略:用專業AI技術、腸(cháng)道菌群技術和免(miǎn)疫食品技術建立老年智能健康服務平台
宗旨:做中國優秀的(de)將人工智能技術應用在老年人群和老年癡呆人群的專業公司
公(gōng)司願(yuàn)景:創建和發展中國領先的老年癡呆、老人智能健康服務平台
公司的核(hé)心價值觀:以人為本、開(kāi)放、自(zì)由、平等、創新、奉獻,人人都是企業的主人
公司的服務目標:通過使用佰和的產(chǎn)品,讓老年癡呆患者和老人過有尊嚴的(de)晚年(nián)生活
社(shè)會責任:減輕國家、社會、家庭(tíng)的負擔,減(jiǎn)輕護工(gōng)的壓力,提高老年癡呆患者生活質量
手機:13925845520
聯(lián)係人:何先生(shēng)
郵箱:henrik@baiherobot.com
網址:www.hggb.cn
地址:東莞鬆山湖高新技術產業開發區科技四路16號光大We穀C2棟(dòng)616室(shì)
Copyright © 東莞佰和生物科技有(yǒu)限公司(sī) 備案號:粵ICP備19095204號
地址:東莞鬆山湖高新技術產業開發區科技四路16號光大We穀C2棟616室